Arduino Self-Driving Car
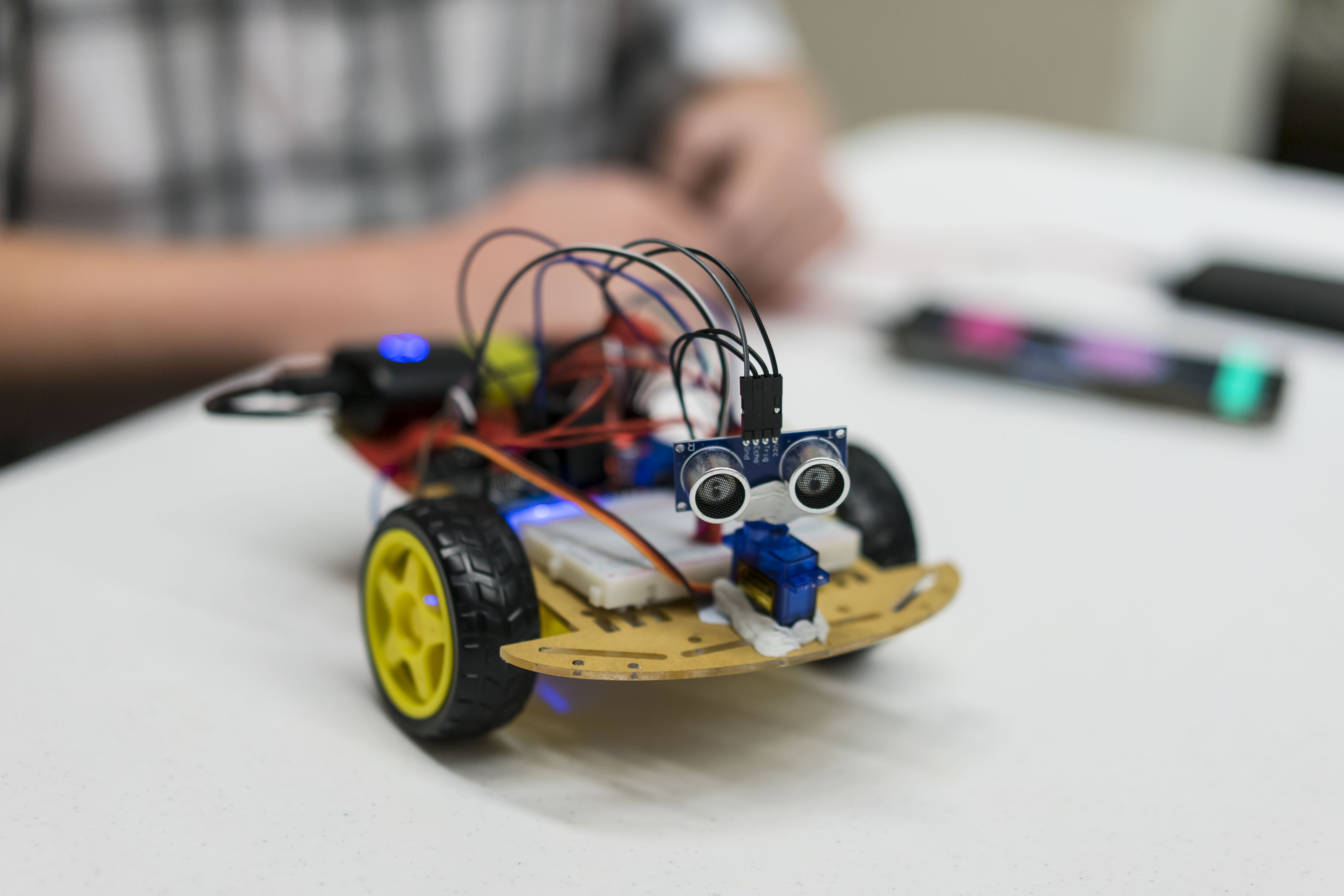
You can check out the Github repository for this project hereThis was my final project for a my physical computing course at UMass Amherst. Using a WeMos board, an Arduino, and other components, my partner and I created a car that used a swerving ultrasonic distance sensor to drive itself and avoid objects. The car could drive itself using this sensor, but could be switched to manual operation by using an internet connection and a custom Blynk app with driver controls. The picture shown above was taken during our Maker Fair in December 2018, where we presented our car and allowed the public to play with it.
The source code for this project was written for the Arduino in a language built on top of C++. More information including a hardware list and the original source code can be found on my Github repository linked above.